产品分类
NBK膜片型联轴器XGHW-C
- 价格:面议
- 购买咨询:


产品介绍
- 推荐适用马达
- 特性
- 为高刚性联轴器加入了减振功能的挠性联轴器。
- 是兼顾高刚性和减振功能的结构。减振功能通过旋转传动部之外的惯性体、弹性体构成的阻尼器*1来实现。
- 从马达轴侧的轴套到从动轴的轴套为止的旋转传动部不使用树脂弹性体,从而实现高刚性。
- 在伺服马达高增益化之外,实现了高负荷用途下的高定位精度。
- 整定时间
- 定位精度、重复定位精度
- 超调量
- 汇总
- 整定时间、定位精度与超调量测量
可传递摩擦力矩
如下表所示,夹紧型XGHW-C的轴的可传递摩擦力矩因轴孔径的不同而异。选择时敬请注意。单位 : N・m
| 外径 | 轴孔径(mm) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 3 | 4 | 5 | 6 | 6.35 | 8 | 9.525 | 10 | 11 | |
| 27 | 0.7 | 1.7 | 3 | ||||||
| 36 | 2 | 2.9 | 4 | 4.2 | 5.8 | ||||
| 41 | 3.5 | 4.9 | 5.5 | 7.9 | 10 | 11 | 12 | ||
| 49 | 6 | 8 | 13 | 18 | 19 | 23 | |||
轴尺寸容许偏差为h7、硬度为34-40HRC、螺丝紧固扭矩为XGHW-C尺寸表中的试验值,并非保证值。
可传递摩擦力矩会根据使用条件而变化。请事先在与实际情况相同的条件下进行试验。
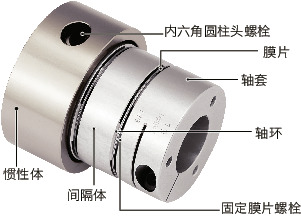
构造
夹紧型
XGHW-C
材质、表面处理
| XGHW-C | |
|---|---|
| 轴套 | A2017 阳极氧化处理 |
| 间隔体 | A2017 阳极氧化处理 |
| 固定膜片螺栓 | SCM435 四氧化三铁保护膜(黑) |
| 膜片 | SUS304 |
| 轴环 | SUS304 |
| 内六角圆柱头螺栓 | SCM435 四氧化三铁保护膜(黑) |
| 惯性体 | S45C 无电解镀镍 |
| 弹性体 | FKM |
特点
| XGHW-C | |
|---|---|
| 伺服马达 | ◎ |
| 步进马达 | ◎ |
| 通用马达 | ● |
◎:特优 ○:优 ●:可使用
| XGHW-C | |
|---|---|
| 零背隙 | ◎ |
| 适用于高增益 | ◎ |
| 高扭矩 | ◎ |
| 高扭转刚性 | ◎ |
| 容许误差调整 | ○ |
| 减振性 | ◎ |
| 可使用温度 | -10℃~60℃ |
◎:特优 ○:优

*1: 阻尼器是将振动体与起辅助作用的惯性体通过弹性体进行接合,从而抑制振动体共振现象的机构。

用途
引动器/表面封装机/精密XY轴滑台/分度台使用注意事项
安装时,请注意勿对阻尼器施加过大的扭矩等外力。有引起阻尼器脱落的风险。选型
根据轴径、额定扭矩选型
轴径和额定扭矩交差区域为选型规格。
选型示例
选型条件为轴径φ14、负荷扭矩3N・m时,选型规格为XGHW-41C。根据伺服马达的额定输出选型
| 额定输出 (W) |
伺服马达规格*1 | 选型规格 | ||
|---|---|---|---|---|
| 马达轴径 (mm) |
额定扭矩 (N・m) |
瞬时最大扭矩 (N・m) |
XGHW-C | |
| 50 | 6-8 | 0.16 | 0.48 | 27C |
| 100 | 8 | 0.32 | 1.1 | 27C |
| 200 | 9-14 | 0.64 | 2.2 | 36C |
| 400 | 14 | 1.3 | 4.5 | 41C |
| 750 | 16-19 | 2.4 | 8.4 | 49C |
*1: 马达规格为常规值。详情请参阅各马达生产厂家的产品目录。是不使用减速机等情况下的推荐尺寸。
伺服马达的增益与整定时间
伺服马达的增益是表示所执行的动作与指令的接近程度的指标。提高增益后可缩短整定时间,但如果增益过高,则会发生共振,从而导致伺服马达失控。
为了在抑制共振的同时提高马达的增益,必须对伺服马达的各参数进行微调。
然而,由于弹性部使用金属的膜片型等联轴器在提高增益时容易发生共振,因此仅通过参数的微调来提高增益有一定的限度。
发生共振时,为了提高旋转系统的刚性,建议更换使用刚性更高的联轴器。
但实际上,有时仅提高联轴器的刚性很难提高包括滚珠丝杠在内的旋转系统整体的刚性,可能没有效果。

高刚性减振型
通过阻尼器为高刚性的膜片型加入减振功能,高刚性减振型XGHW-C可以在比常规的膜片型更高的增益下使用,可缩短整定时间。另外,减振功能可以减轻麻烦的参数调整作业,从而缩短找出最佳参数所需的时间。
为什么高刚性减振型XGHW-C比膜片型XHW-C更能提高增益?
XGHW-C比膜片型XHW-C更能提高伺服马达增益的原因,可从波特图看出。与波特图相位延迟-180°的点的0dB之间的增益幅度称为增益裕量,与折点频率的180°之间的相位幅度称为相位裕量。
一般来说,伺服系统中的增益裕量大致为10~20dB,相位裕量大致为40 - 60°。如果提高伺服马达的增益,则增益裕量将减小。如果增益裕量在10dB以下,则容易发生共振。
对XGHW-C与XHW-C的极限增益(不会发生共振,并且可使用联轴器的增益上限值)进行比较后,发现XGHW-C的增益裕量较大,并且大于10dB。因此,与XHW-C相比,更能提高伺服马达的增益。
膜片型极限增益时的增益裕量
XGHW-C:15.76dB
XHW-C:8.67dB
波特图

高刚性减振型与膜片型的比较
使用了伺服马达与引动器的右述试验,确认了以下事项。
提高增益可缩短整定时间,但高刚性减振型可以设定为比膜片型更高的增益。
不会因增益或联轴器而产生差异。
如果增益提高,则超调量变大,但如果增益相同,则超调量无差异。
可设定较高增益的高刚性减振型可将整定时间压缩至比膜片型更短。定位精度、重复定位精度、超调量不因联轴器而产生差异。
最终确认了高刚性减振型有助于缩短装置、设备的周期。
试验装置
引动器:KR30H THK(株)制
*滚珠丝杠导程10mm
伺服马达:HG-KR13 三菱电机(株)制
试验条件
马达转速:3000min-1
加减速时间:50ms
工件负荷:3.0kg
负载转动惯量比:2.3
试验动作
正转(1rev)→停止(500ms)→反转(1rev)试验方法
通过位移传感器计测工件的动作,测量工件移动量及整定时间。
| 增益*1 | 高刚性减振型 | 膜片型 | 考察 | |
|---|---|---|---|---|
| 23 | 整定时间(ms) | 35 | 32 | 膜片型可使用的增益上限值。 高刚性减振型可正常使用。 |
| 定位精度(mm) | 0.014 | 0.014 | ||
| 重复定位精度(mm) | ±0.002 | ±0.002 | ||
| 超调量(μm) | 1 | 1 | ||
| 32 | 整定时间(ms) | 8 | 发生共振 | 高刚性减振型可使用的增益上限值。 膜片型因发生共振而无法使用。 |
| 定位精度(mm) | 0.016 | |||
| 重复定位精度(mm) | ±0.001 | |||
| 超调量(μm) | 2 |
*1: 调整了位置控制增益、速度控制增益等所有增益后的值(最小:1 - 最大:32)
定位精度
:进行定位,求出目标点与实际停止位置之差的绝对值。该测量在从原点开始的最大行程范围内的各个点上进行,定位精度表示所求出值中的最大值。
重复定位精度
:在任意一点上重复进行7次相同动作方向的定位并测量停止位置,求出停止位置的最大值与最小值之差。该测量分别在最大行程范围的中央与大致两端的位置进行,以所求出的值中最大的值作为测量值,在该值的1/2倍上加上±进行表示。
表中的值因试验条件而异。
偏心反作用力

轴向反作用力

温度引起的静态扭转刚性数值的变化
以20℃时的静态扭转刚性数值为100%时的值。XGHW-C的静态扭转刚性数值很少因温度而产生变化,定位精度变化极小。在高温下使用时,请注意轴因热膨胀而出现的伸长或弯曲所引起的误差。

生产效率与整定时间
在使用了伺服马达和滚珠丝杠的单轴引动器的生产设备中,使伺服马达和引动器按照程序指令动作,有助于提高生产效率。但是,实际的动作相对于指令往往会出现滞后,想要使引动器在指定位置停止时,停止动作会晚于停止指令。这种滞后称为整定时间。
如果引动器不完全停止,则无法转入下一工序。因此,为了提高生产效率,缩短整定时间非常重要。
